
Inhaltsverzeichnis
Für dieses Projekt benötigst du
Ein NEMA17 Schrittmotor mit EasyDriver an einem Arduino Mikrocontroller verwenden
Schrittmotoren stellen für Anfänger zunächst eine große Herausforderung dar. Neben der Auswahl eines Motors mit den nahezu unendlich vielen verschiedenen technischen Eigenschaften ist auch die Programmierung eine große Hürde.
Denn anders als bei herkömmlichen Elektromotoren drehen sich Schrittmotoren nicht sofort, wenn man eine elektrische Spannung anlegt. Dabei spielen typische Schrittmotoren wie der NEMA17 oder NEMA23 in der Welt der Technik eine besondere Rolle, wenn es darum geht, Bauteile mit einer exakten Drehbewegung zu versorgen. Nahezu jeder 3D-Drucker wird beispielsweise mit dieser Art des Schrittmotors in Bewegung versetzt.
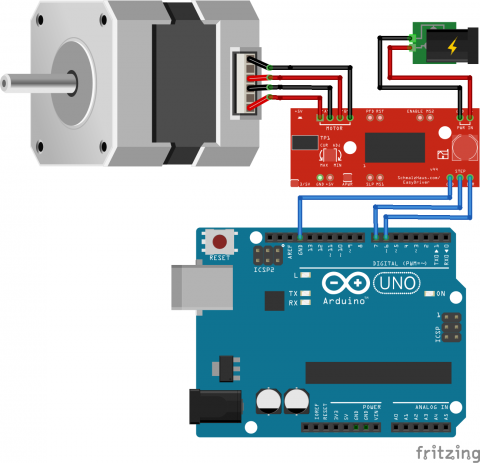
Für diese Anleitung verwenden wir einen typischen NEMA17 Schrittmotor mit zwei Phasen (4 Anschlussleitungen) und dem EasyDriver als Motortreiber. Ebenso wird ein Arduino UNO verwendet, um das Signal für den Schrittmotor zu erzeugen. Als Spannungsquelle verwenden wir ein externes Netzteil mit 9V und 1A.
Schaltskizze
Beispielsketch
int Schrittmotor=8; // Pin 8 an „Step“
int Richung = 7; // Pin7 an „Dir“
void setup()
{
pinMode(Schrittmotor, OUTPUT); // Pin8 muss ein Ausgang sein, damit hier ein Signal gesendet werden kann.
pinMode(Richtung, OUTPUT); // Pin7 muss ein Ausgang sein, damit hier ein Signal gesendet werden kann.
digitalWrite(Richtung, LOW); // Das Signal für die Richtung wird zunächst auf LOW gesetzt. Wenn die Drehung nicht in die gewünschte Richtung geht, wird das Signal auf HIGH geändert.
}
void loop()
{
digitalWrite(Schrittmotor, HIGH);
delay(10);
digitalWrite(Schrittmotor, LOW);
delay(10);
}Um die technischen Abläufe zu verstehen, sollte man sich die folgenden Links zum EasyDriver genauer ansehen.
http://www.schmalzhaus.com/EasyDriver/
https://www.schmalzhaus.com/EasyDriver/Examples/EasyDriverExamples.html
Schrittmotoren und Gleichstrommotoren – Wo ist der Unterschied?
Aufgrund der Fortschritte der Motorentechnologie in den letzten Jahrzehnten ist es schwieriger geworden, den richtigen Elektromotor für ein Projekt zu finden. Zeitgleich hat jedoch der Fortschritt in der elektrischen Ansteuerung von Motoren dazu geführt, dass immer mehr Motoren mit einfachen Mitteln in Betrieb genommen werden können. Insbesondere die Fortschritte in der Mikrocontrolling-Thematik mit Arduino führt dazu, dass auch Tüftler und Bastler die einst eher seltenen Schrittmotoren mit ihrer komplexen Ansteuerung verwenden können.
Während Gleichstrommotoren und Schrittmotoren mit Gleichstrom betrieben werden, unterscheiden sie sich im Aufbau, in den Funktionsprinzipien und in der Funktion.
Gleichstrommotoren verwenden, wie der Name schon sagt, Gleichstrom (z. B. von Batterien oder Netzteilen), um eine Drehbewegung zu erzeugen.
Im Bastelbereich unterscheidet man dabei noch zwischen „Bürstenmotoren“ und „Bürstenlosen Motoren“, wobei die letzteren im alltäglichen Gebrauch nur als „Brushlessmotoren“ bezeichnet werden. Brushlessmotoren verdrängen aufgrund ihrer diversen Vorteile die älteren Motoren immer mehr. Bürstenmotoren haben sogenannte „Kohlenbürsten“, die an beweglichen Motorenteilen (Kommutator) entlang schleifen und dadurch im Inneren des Motors die Magnetfelder so umpolen, dass permanent eine Magnetkraft wirken kann. Bei den neueren Brushlessmotoren erfolgt die Umpolung der Magnetfelder elektronisch, wodurch die Effektivität und die Haltbarkeit wesentlich höher ist.
Schrittmotoren verwenden zwar Gleichstrom, besitzen jedoch keine Kohlebürsten oder mechanische Komponenten typischer Gleichstrommotoren. Eine elektronische Motorsteuerung, auch Motortreiber genannt, steuert den Strom zu jeder im Motor enthaltenen Magnetspule. Der Rotor, also die drehende Komponente des Motors, dreht sich daraufhin in Abhängigkeit der entstehenden Magnetfelder ganz exakt in die Position, die durch die elektrische Ansteuerung vorgesehen ist. Das macht den Motor sehr präzise und die Drehbewegung lässt sich exakt steuern. Jede kleine Drehbewegung, also die Drehung des Rotors in die nächste Position des Magnetfeldes, wird als „Schritt“ bezeichnet. Daher kommt auch die Bezeichnung „Schrittmotor“. Schrittmotoren sind daher keine wirklich kontinuierlichen Motoren, bieten jedoch in Kombination mit einer Schrittsteuerung eine genaue Positionierung.
Schrittmotoren können anders als Gleichstrommotoren auch ein Haltemoment, also eine Fixierung der Drehachse, erzeugen. Dabei bleibt der Rotor in einem sich nicht weiter veränderndem Magnetfeld stehen. Daher eignen sich Schrittmotoren hervorragend für Robotik- und andere Positionierungsanwendungen, wie beispielsweise in 3D-Druckern, Festplatten und Steuerungssystemen.
Gleichstrommotoren sind leicht zu steuern und benötigen lediglich eine Eingangsspannung an den beiden Leitungen. Durch Einstellen der Eingangsspannung wird die Motordrehzahl geändert und durch Umkehren der Leitungen kehrt der Gleichstrommotor die Richtung um. Schrittmotoren sind ebenfalls sehr einfach zu bedienen, erfordern jedoch eine Art Mikrocontroller, wie zum Beispiel von Arduino, um den Rotor von einem Pol zum nächsten zu bewegen.
Der Drehzahlbereich von Schrittmotoren liegt typischerweise unter 2000 Umdrehungen pro Minute, da ihr Drehmoment mit zunehmender Drehzahl abnimmt. Sie sind auch nicht für den Dauereinsatz gedacht, da Schrittmotoren dazu neigen, heiß zu laufen, wenn sie über einen längeren Zeitraum mit Strom versorgt werden. Gleichstrommotoren gibt es in verschiedenen Formen und bieten einen viel größeren Drehzahlbereich. Sie können auch ohne große Probleme ununterbrochen laufen, obwohl diese Motoren ständig gewartet werden müssen, um dies zu tun (insbesondere in industriellen Einsatzbereichen).
Schrittmotoren bieten ihr maximales Drehmoment bei niedrigen Drehzahlen, was sie besonders für hochpräzise Anwendungen wie Robotik und 3D-Drucker geeignet macht. Einige Gleichstrommotoren erzeugen auch bei niedrigen Drehzahlen hohe Drehmomente, eignen sich jedoch besser für den Dauereinsatz, da ihr Drehmoment über ihren Drehzahlbereich konstant ist.
Funduino - Dein Onlineshop für Mikroelektronik
-
Dauerhaft bis zu 10% Rabatt für Schüler, Studenten und Lehrkräfte
-
Mehr als 3.500 Artikel sofort verfügbar!
-
Über 8 Jahre Erfahrung mit Arduino, 3D-Druck und co.