
Inhaltsverzeichnis
Für dieses Projekt benötigst du
Einen Servomotor am NodeMCU verwenden
Aufgabe: Ein Servo soll von einem NodeMCU angesteuert werden. Der Servo soll dazu in diesem Beispiel drei verschiedene Positionen ansteuern und zwischen den Positionen eine kurze Zeit warten.
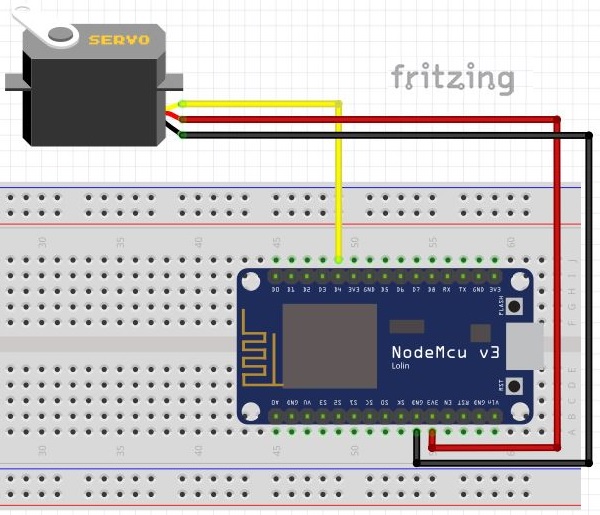
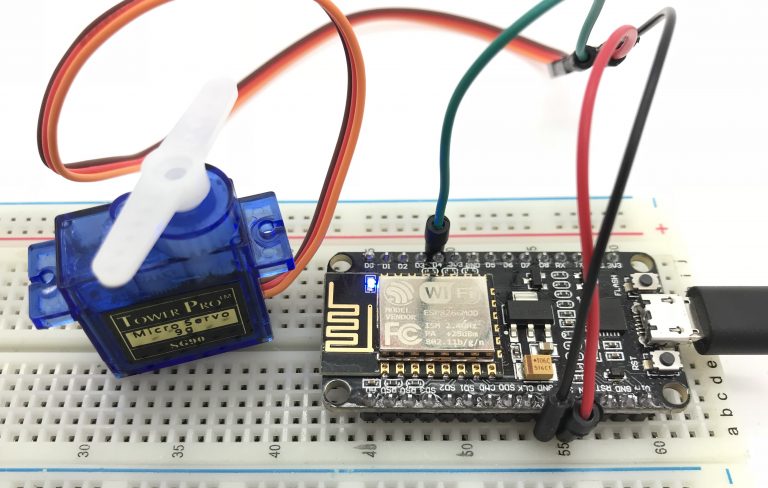
Der Aufbau
#include <Servo.h> //Die Servobibliothek wird aufgerufen. Sie wird benötigt, damit die Ansteuerung des Servos vereinfacht wird.
Servo servoblau; //Erstellt für das Programm ein Servo mit dem Namen „servoblau“
void setup()
{
servoblau.attach(D4); //Das Setup enthält die Information, dass das Servo an der Steuerleitung (gelb) mit Pin D4 verbunden wird. Hier ist natürlich auch ein anderer Pin möglich.
}
void loop()
{ //Im „loop“ wird über den write-Befehl „servoblau.write(Grad)“ das Servo angesteuert. Zwischen den einzelnen Positionen gibt es eine Pause, damit das Servo genug Zeit hat, die gewünschten Positionen zu erreichen.
servoblau.write(0); //Position 1 ansteuern mit dem Winkel 0°
delay(3000); //Das Programm stoppt für 3 Sekunden
servoblau.write(90); //Position 2 ansteuern mit dem Winkel 90°
delay(3000); //Das Programm stoppt für 3 Sekunden
servoblau.write(180); //Position 3 ansteuern mit dem Winkel 180°
delay(3000);//Das Programm stoppt für 3 Sekunden
servoblau.write(20); //Position 4 ansteuern mit dem Winkel 20°
delay(3000);//Das Programm stoppt für 3 Sekunden
}Funduino - Dein Onlineshop für Mikroelektronik
-
Dauerhaft bis zu 10% Rabatt für Schüler, Studenten und Lehrkräfte
-
Mehr als 3.500 Artikel sofort verfügbar!
-
Über 8 Jahre Erfahrung mit Arduino, 3D-Druck und co.
SALE
