
Inhaltsverzeichnis
Für dieses Projekt benötigst du
Den Rotary Encoder KY-040 an einem Arduino Mikrocontroller verwenden
Wie funktioniert der Encoder?
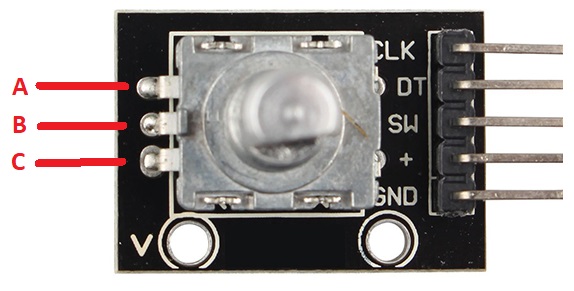
Die zu sehenden Pins werden A, B und C genannt. Dabei sind jeweils Pin A und Pin C, sowie Pin B und Pin C miteinander verbunden. In jeder Encoder Position sind beide Verbindungen entweder geöffnet oder geschlossen. Rotiert man den Knopf nun in eine beliebige Richtung (im oder gegen den Uhrzeigersinn), verändert sich der Status wie folgt:
Wenn beide Verbindungen geschlossen sind, bewirkt eine Rotation des Knopfes die Öffnung der Verbindungen.
Wenn beide Verbindungen geöffnet sind, bewirkt eine Rotation des Knopfes die Schließung der Verbindungen.
Dabei gilt ebenfalls:
Rotiert man den Knopf im Uhrzeigersinn, verändert sich zuerst der Status der Verbindung zwischen den Pins A und C.
Rotiert man den Knopf gegen den Uhrzeigersinn, verändert sich zuerst der Status der Verbindung zwischen den Pins B und C.
Die Reihenfolge dieser Statusänderungen werden vom Controller ausgelesen und ausgewertet.
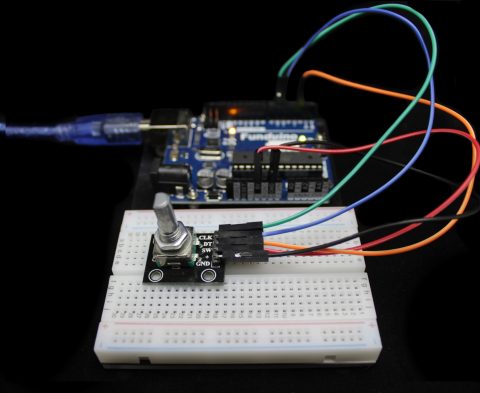
Pinbelegung
Der Rotary Encoder KY-040 verfügt über fünf Pins:
CLK = „Serial Clock“ Pin, Daten-Output 1, anzuschließen am digitalen Pin 6 des Mikrocontrollers.
DT = Einzigartiger Pin des Moduls, Daten-Output 2, anzuschließen am digitalen Pin 5 des Mikrocontrollers.
Die Pins CLK und DT können an einen digitalen Pins eurer Wahl angeschlossen werden. In unserem folgenden Sketch verwenden wir die oben genannten Pins D5 und D6.
SW = Switch-Pin – Dieser gibt ein „LOW“ Signal weiter, wenn der Knopf des Encoders betätigt wird. Anzuschließen an einen Interrupt-Pin des Mikrocontrollers.
+ = Pin für die Spannungsversorgung (sonst VCC), anzuschließen an den 5V Pin des Mikrocontrollers.
GND = Ground Pin, anzuschließen an den GND Pin des Mikrocontrollers.
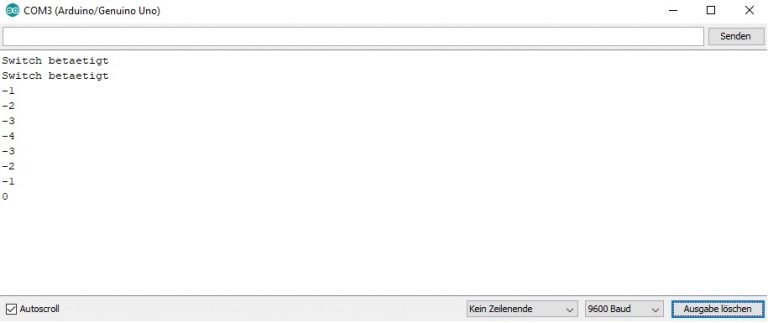
Nun widmen wir uns dem Auslesen der jeweiligen Schrittposition des Encoders. Zudem möchten wir auslesen können, ob der Knopf des Encoders betätigt wurde. Die erhobenen Daten sollen im seriellen Monitor angezeigt werden. Dies gelingt uns unter anderem durch die Verwendung des attachInterrupt() Befehls.
Eine ausführliche Dokumentation dieser Funktion finden Sie hier.
Achtung: Das Rotary Encoder Modul KY-040 benötigt eine eigene Bibliothek. Diese Bibliothek mit dem Namen „Encoder Library“ findest du im nachfolgenden Link.
Beispielsketch
#include <Encoder.h> // Verwendung der Bibliothek
const int CLK = 6; // Definition der Pins. CLK an D6, DT an D5.
const int DT = 5;
const int SW = 2; // Der Switch wird mit Pin D2 Verbunden. ACHTUNG : Verwenden Sie einen interrupt-Pin!
long altePosition = –999; // Definition der "alten" Position (Diese fiktive alte Position wird benötigt, damit die aktuelle Position später im seriellen Monitor nur dann angezeigt wird, wenn wir den Rotary Head bewegen)
Encoder meinEncoder(DT,CLK); // An dieser Stelle wird ein neues Encoder Projekt erstellt. Dabei wird die Verbindung über die zuvor definierten Varibalen (DT und CLK) hergestellt.
void setup() // Beginn des Setups
{
Serial.begin(9600);
pinMode(SW, INPUT); // Hier wird der Interrupt installiert.
attachInterrupt(digitalPinToInterrupt(SW), Interrupt, CHANGE); // Sobald sich der Status (CHANGE) des Interrupt Pins (SW = D2) ändern, soll der Interrupt Befehl (onInterrupt)ausgeführt werden.
}
void loop()
{
long neuePosition = meinEncoder.read(); // Die "neue" Position des Encoders wird definiert. Dabei wird die aktuelle Position des Encoders über die Variable.Befehl() ausgelesen.
if (neuePosition != altePosition) // Sollte die neue Position ungleich der alten (-999) sein (und nur dann!!)…
{
altePosition = neuePosition;
Serial.println(neuePosition); // …soll die aktuelle Position im seriellen Monitor ausgegeben werden.
}
}
void Interrupt() // Beginn des Interrupts. Wenn der Rotary Knopf betätigt wird, springt das Programm automatisch an diese Stelle. Nachdem…
{
Serial.println("Switch betaetigt"); //… das Signal ausgegeben wurde, wird das Programm fortgeführt.
}
Funduino - Dein Onlineshop für Mikroelektronik
-
Dauerhaft bis zu 10 % Rabatt für Schüler, Studenten und Lehrkräfte
-
Mehr als 4.000 Artikel sofort verfügbar!
-
Mehr als 10 Jahre Erfahrung mit Arduino, 3D-Druck und co.
 Heute schon gespart?
Heute schon gespart?