
Inhaltsverzeichnis
Für dieses Projekt benötigst du
Einen Schrittmotor am NodeMCU verwenden
Bei diesem Schrittmotor handelt es sich um einen Schrittmotor, der sich speziell für kleine Anwendungen mit dem NodeMCU eignet. Die Besonderheit liegt darin, dass er ohne eine externe Spannungsversorgung betrieben werden kann. Der Motor entwickelt dabei ein relativ hohes Drehmoment. Dies wird durch ein Getriebe realisiert, welches innerhalb des Metallgehäuses vor dem eigentlichen Schrittmotor verbaut wurde. Dadurch wird es in dieser kompakten Bauweise überhaupt erst möglich, dass sich eine ganze Umdrehung der Antriebswelle auf 2048 Einzelschritte aufteilen lässt. Ein kleiner daraus resultierender Nachteil ist die langsame maximale Drehgeschwindigkeit.
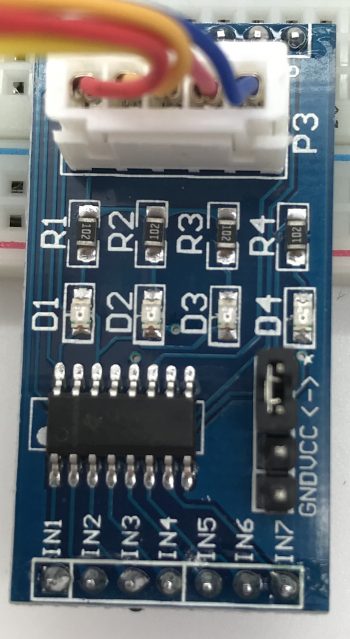
Der Schrittmotor wird an eine Motorsteuerungsplatine angeschlossen. Diese versorgt den Motor mit ausreichend elektrischer Energie, damit die Leistung nicht von den digitalen Pins des NodeMCU aufgebracht werden muss. Die Steuerungsplatine gibt es in zwei Versionen, bei denen die seitlich angebrachten Pins entweder nach oben oder nach unten aus der Platine herausragen. Die Anschlussbelegung ist jedoch gleich.
Der Aufbau
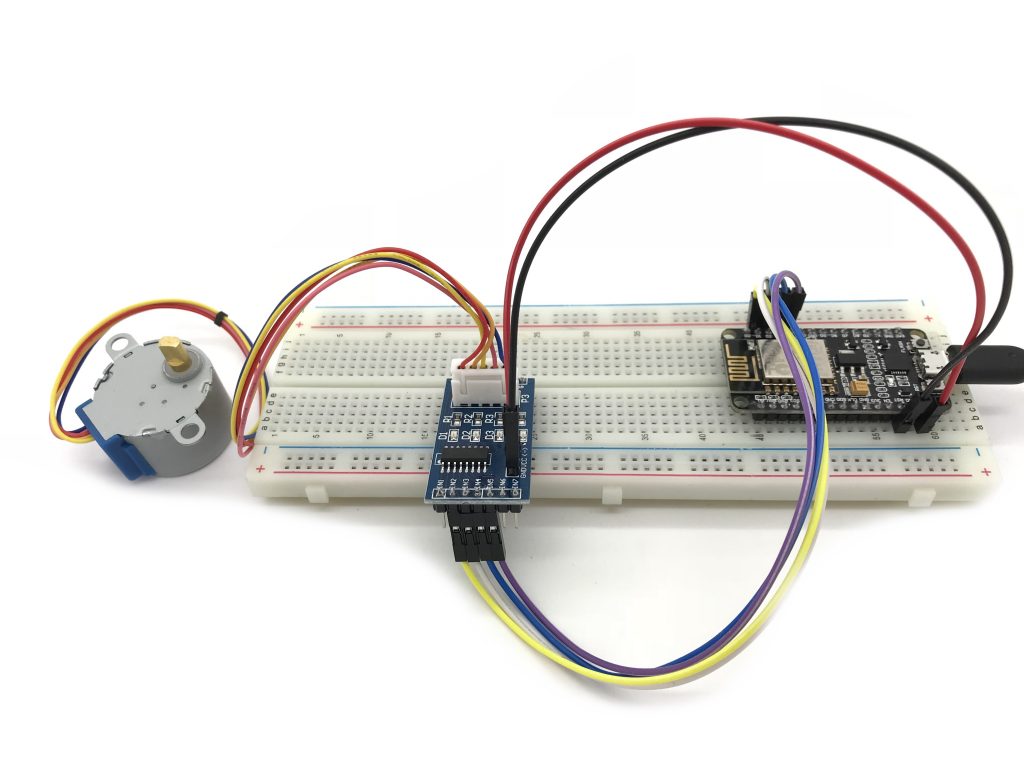
Pinout
- IN1 der Motorsteuerplatine = Pin D4
- IN2 der Motorsteuerplatine = Pin D3
- IN3 der Motorsteuerplatine = Pin D2
- IN4 der Motorsteuerplatine = Pin D1
- GND der Motorsteuerplatine = GND Pin
- VCC der Motorsteuerplatine = VIN Pin
Der Sketch
Dies ist ein Beispielcode, der den Motor abwechselnd um 2048 Schritte (entspricht einer ganzen Umdrehung) vor- und zurückdrehen lässt.
#include <Stepper.h> // Hinzufügen der Programmbibliothek.
int SPU = 2048; // Schritte pro Umdrehung.
Stepper Motor(SPU, D1,D2,D3,D4); // Der Schrittmotor erhält die Bezeichnung "Motor" und es wird angegeben, an welchen Pins der Motor angeschlossen ist.
void setup() //Hier beginnt das Setup.
{
Motor.setSpeed(5); // Angabe der Geschwindigkeit in Umdrehungen pro Minute.
}
void loop() {
Motor.step(2048); // Der Motor macht 2048 Schritte, das entspricht einer Umdrehung.
delay(1000); // Durch diese Pause bleibt der Motor nach der Drehung für eine Sekunde stehen.
Motor.step(-2048); // Der Motor macht durch das Minuszeichen 2048 Schritte in die andere Richtung.
delay(1000); // Durch diese Pause bleibt der Motor nach der Drehung für eine Sekunde stehen.
}Funduino - Dein Onlineshop für Mikroelektronik
-
Dauerhaft bis zu 10% Rabatt für Schüler, Studenten und Lehrkräfte
-
Mehr als 3.500 Artikel sofort verfügbar!
-
Über 8 Jahre Erfahrung mit Arduino, 3D-Druck und co.
